
Add a joint states stream
You can configure a joint states stream in the teleoperation view. Using ROS, you can visualize joint states, planned paths, and perform motion control through the joint states module. Using the API, you can visualize joint states.
This guide will teach you how to add a joint states stream to your teleoperation view.
Step 1: Navigate to device teleoperation settings
- In Formant, in the upper-left corner, open the menu and click Settings.
- Click Devices, and then click on the device you want to configure.
- Click on the Teleoperation tab to open the teleoperation configuration page.
Step 2: Add a joint states observation stream
ROS
Formant supports the sensor_msgs/JointState ROS data type.
- In the teleoperation configuration page, scroll down to Joint States and click the plus (+) icon.
- Click Add ROS Topic.
- Enter the ROS topic to which contains the joint state data you want to stream.
- Click Done. If you want to configure motion control via the joint states stream, proceed to Step 3. If you are only interested in observing joint states, proceed to Step 4.
API
- In the teleoperation configuration page, scroll down to Joint States and click the plus (+) icon.
- Click Add from API.
- Enter the name of the joint states stream.
- Click Done, and then proceed to Step 4.
Step 3 (ROS only, optional): Configure joint control
In this section, we'll connect our joint states streams to additional topics to send pose data from Formant to your device.
- Click the joint states stream you just created in Step 2. This will open the configuration window.
- Configure your joint states stream for control as follows:
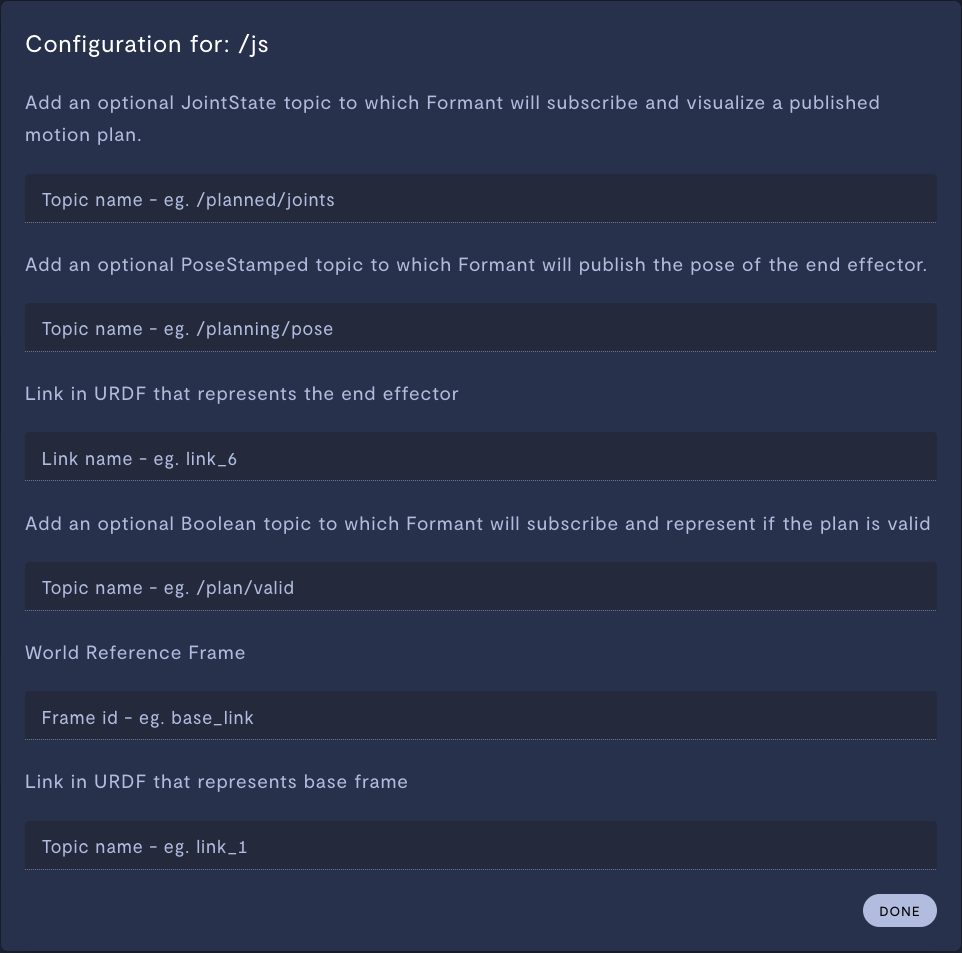
| Property | Usage |
|---|---|
Topic name - e.g. /planned/joints | If you are using a library which publishes planned joint state data, you can subscribe to that topic here. |
Topic name - e.g. /planning/pose | If configured, when you click and drag a pose on your joint states diagram, Formant will send the new pose to this topic. |
Link name - e.g. link_6 | Enter the name of the link in your robot URDF which represents the end effector. |
Topic name - e.g. /plan/valid | Subscribe to the topic which reports if your robot can successfully achieve a requested pose. |
Frame id - e.g. base_link | Provide the world reference frame. |
Topic name - e.g. link_1 | Provide the base frame which connects the robot to the ground. |
- Click Done, and then Save to confirm your teleoperation settings.
Step 4: Add the joint states stream to your teleoperation view
Now that we have a joint states stream configured, we'll add it to our teleoperation view.
- Scroll to the top of the teleoperation settings page.
- In either the Primary View or Sidebar View, click the dropdown and select the joint states stream you just configured.
- Click Save to confirm your teleoperation settings.
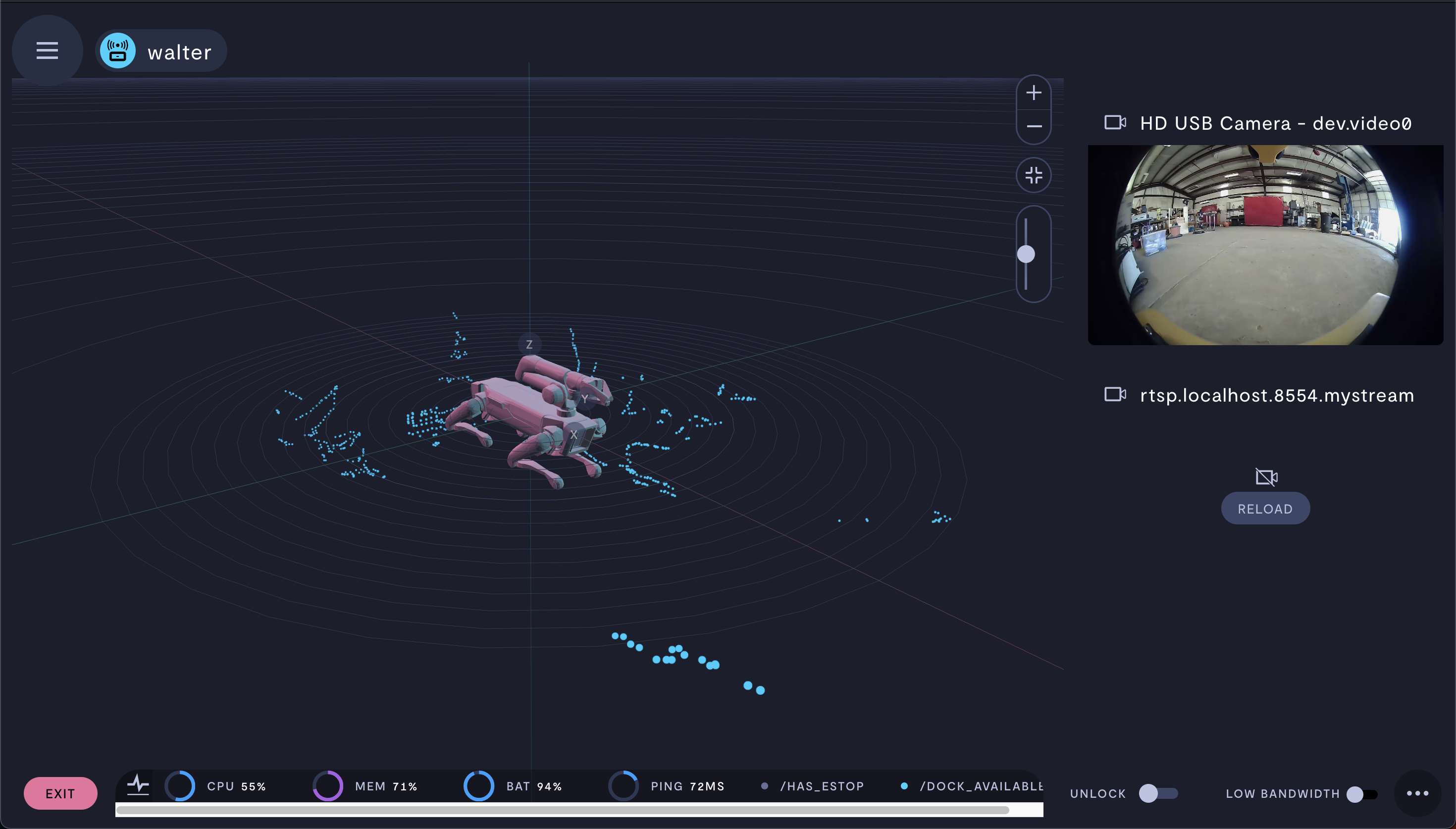
Step 5: Verify your work in teleoperation mode
- In your device view, in the upper-right corner, click the three dots >> Teleop, or enter Shift + T.
- Verify that you're able to see your joint states stream:
If you notice an issue with this page or need help, please reach out to us! Use the 'Did this page help you?' buttons below, or get in contact with our Customer Success team via the Intercom messenger in the bottom-right corner of this page, or at [email protected].
Updated about 2 months ago