
3D scene module
The Formant 3D Scene Module is a powerful module that lets you visualize and layer spatial data emitted by your fleet of devices.
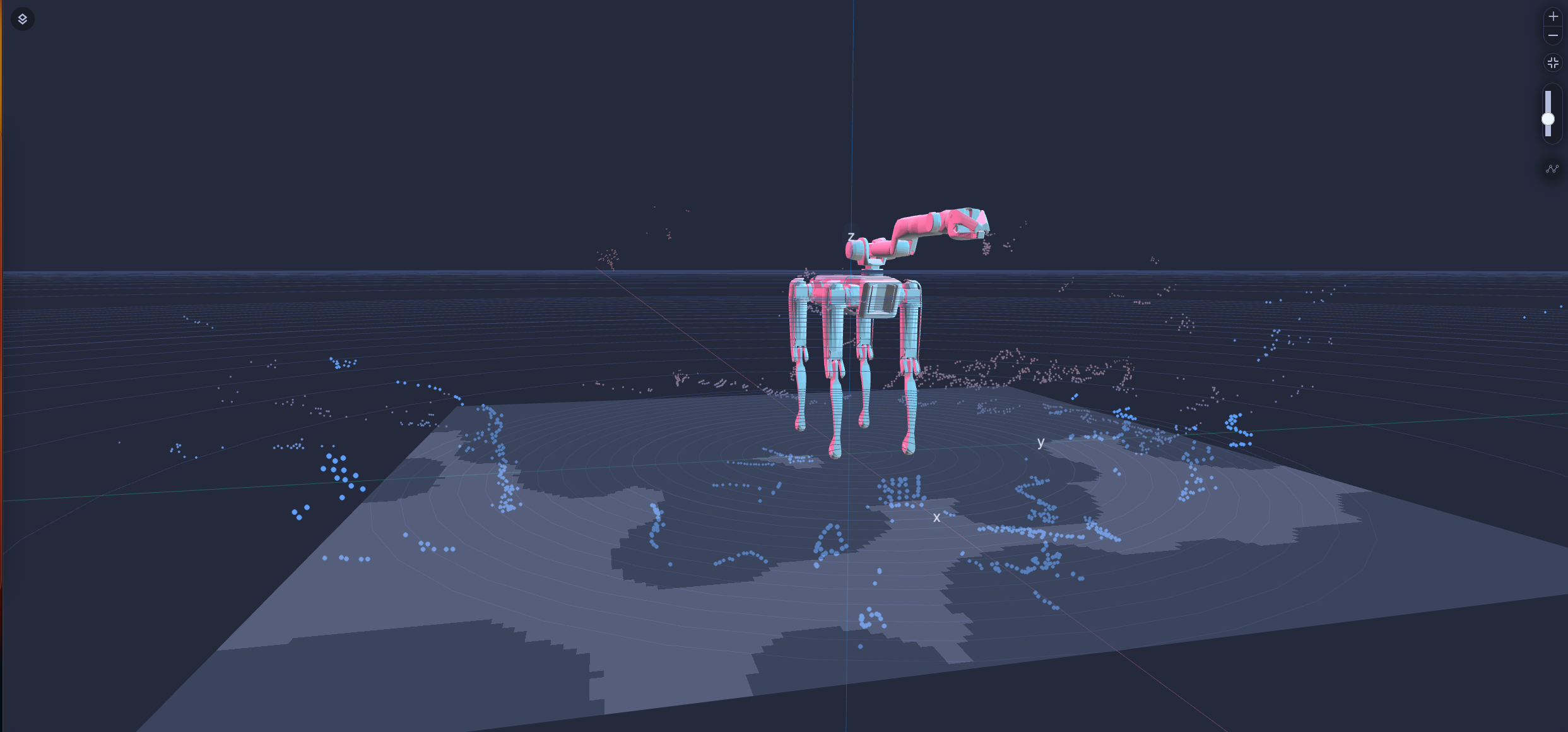
3D visualization of a robot URDF with occupancy and point cloud data on a Cartesian coordinate system.
Using the 3D Scene Module, you can visualize:
- localization interfaces to navigate your robot.
- a fleet of devices on a GPS world map.
- environment data stacked with your robot's URDF file to get ambient information while teleoperating in realtime.
Formant's 3D Scene can be extended with custom layers to view live or historical data of individual devices or a fleet as per your project's requirements. The 3D Scene supports many ROS data types, but is not exclusive to ROS as it can also visualize data ingested via the Formant Python SDK.
Concepts
Device
Your device is the source of many of the data streams you will visualize, as well as the subject of your visualizations. You can use visualizations to model your robot's view of the world and make decisions or take actions based on that worldview.
In the 3D Viewer, you can show data layers from a single device, a fleet of devices, or specified device groups or tags.
Maps
Maps are the foundation for your robot visualization. You can underlay your 3D visualization with an occupancy grid, a GPS map, or you can use a simple Cartesian coordinate system.
You will add data layers and visualizations on top of your map.
Layers
Layers are 3D data renderings that are laid on top of your map. These can be static file renderings, such as images or GLTF files, or they can be live visualizations of your robot's data streams.
The following layers are currently natively supported in the 3D Viewer:
- GPS map
- Occupancy map
- Position indicator
- Geometry
- Point cloud
- Path
You can also develop custom maps and layers for 3D Scene. For more information, see Develop custom 3D Scene maps and layers.
Transforms
A transform positions your data renderings relative to each other, and to the center of your map. As you add layers to your 3D visualization, you can position them using the following parameters:
- Cartesian (fixed positioning)
- GPS
- Odometry
- Transform tree
Layers can be positioned relative to each other, and to their parent layers or maps, to create complex scenes.
.png")
Layering data streams to generate a complex and vivid 3D visualization.
Navigating the 3D Scene Module
Navigation is done through mouse commands:
click+drag - will move your camera parallel to the ground plane
right click+drag - will allow you to rotate the world
mouse scroll or pinch - will allow you to zoom in or out
There are window controls to zoom in or out, or to reset your view.
If you notice an issue with this page or need help, please reach out to us! Use the 'Did this page help you?' buttons below, or get in contact with our Customer Success team via the Intercom messenger in the bottom-right corner of this page, or at [email protected].
Updated 8 months ago