
Add a ROS transform tree stream
This page assumes knowledge of ROS.
In Formant, ROS data which relates to /tf messages is encapsulated in a single data type called transform tree.
ROS message type | Formant datapoint type |
|---|---|
( | Transform tree |
This guide will teach you how to add a Transform tree telemetry stream from the /tf and /tf_static ROS topics.
Step 1: Create a ROS transform tree stream
- In Formant, in the upper-left corner, open the menu and click Settings.
- Click Devices, and then click on the device you want to configure.
- Click the Telemetry tab, and then click Add Stream.
- Click ROS Transform Tree. This will open the New ROS Transform Tree Stream configuration window:
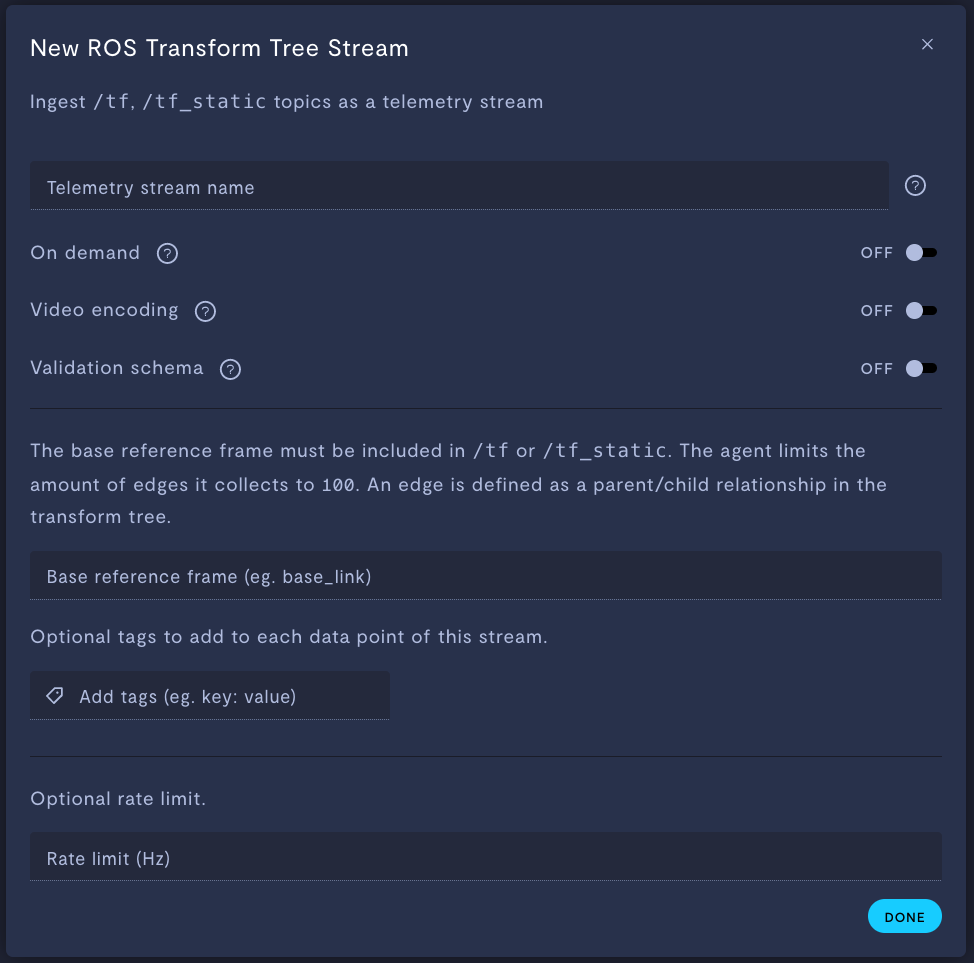
Property | Usage |
|---|---|
Telemetry stream name | Give the stream a name. |
On demand | If ON, this stream will store data locally on your device, and only upload data to Formant when you click Retrieve on-demand data. If OFF, this stream will ingest periodically. |
Video encoding | Only applicable for |
Validation schema | Only applicable for JSON and text streams. Choose a configuration schema for this stream. |
Base reference frame | The base reference frame must be included in |
Add tags (e.g. | Add tags to each datapoint of this stream. For more information on tags, see Configure access levels. |
Rate limit (Hz) (optional) | If If The default rate is 0.5 Hz. |
- When you're finished configuring your stream, click Done, and then Save.
Step 2: Add stream to a view
Once you've added a stream to your device, your next step is to add it to a view in Formant.
Add the streams you want to visualize, and then move on to Viewing data in Formant.
If you notice an issue with this page or need help, please reach out to us! Use the 'Did this page help you?' buttons below, or get in contact with our Customer Success team via the Intercom messenger in the bottom-right corner of this page, or at [email protected].
Updated 4 months ago