
ROS 2 Adapter
Native ROS 2 support in agent version1.226As of Formant agent version
1.226, the agent can ingest ROS 2 data natively. For instructions to install and configure native ROS 2 support with the Formant agent, see Install the Formant agent.Once you've installed the Formant agent with ROS compatibility, you can select your desired ROS version when configuring any data stream.
Delete the ROS 2 adapter from your Formant organization before installing native ROS 2 support.
The native ROS 2 installation does not support ROS service calls. If you need to use ROS service calls, use the ROS 2 adapter.
The ROS 2 adapter allows you to automatically ingest ROS 2 data via the Formant agent.
This guide will teach you how to configure the ROS 2 adapter, use it to stream data from ROS 2 topics to Formant streams, and control your robot using ROS 2 services.
When ingesting data via the ROS 2 adapter, data will appear in telemetry streams as an API stream, not as a ROS stream.
Step 1: Download source code
You can download the source code for the ROS 2 adapter on our GitHub page: GitHub: ROS 2 adapter.
Step 2: Set up config.json file (not recommended)
config.json file (not recommended)It is recommended to skip this step and configure the adapter directly in the Formant app, as seen in Step 4. If you configure your adapter in the
config.jsonfile, you will have to re-zip and re-upload the adapter to Formant every time you want to make a change to the adapter configuration.If Formant detects ROS 2 adapter configuration data either in the adapter configuration window or in blob data (as described below), that configuration data will override the
config.jsonfile included in the adapter zip file.
You can configure your topics and corresponding Formant streams directly in the config.json file in the adapter source code. Once you have configured this file, zip the entire adapter and continue to Step 3.
See the instructions in Step 4 for documentation on how to map ROS 2 topics to Formant streams.
Step 3: Add adapter to Formant
Follow the instructions in Add an adapter, and then proceed to Step 4.
If you use custom messages, you must update the
start.shscript to source your workspace.
Step 4: Configure adapter in Formant (recommended)
It is recommended to configure the adapter directly in the Formant app so that you can make updates to the configuration in the future without having to re-zip and re-upload your adapter.
Formant prioritizes adapter configuration data in the following order:
- Adapter configuration window
- Blob data
config.jsonfile as described in Step 2.
After adding the adapter to Formant, you can configure it either in the blob data for the device to which you want to apply the adapter, or using the built-in adapter configuration interface.
A full example of the JSON configuration schema for the ROS 2 adapter is available in the GitHub repository: GitHub:
config_example_full.json, or in the adapter source code at/formant_ros2_adapter/scripts/config_examples/config_example_full.json.
Configuration overview
This section will describe the JSON schema used by the ROS 2 adapter to map ROS 2 topics to Formant streams.
Adapter configuration is split into six sections: subscribers, publishers, service clients, localization, transform tree, and numeric sets.
Subscribers
The subscribers section defines a list of ROS2 topics that the adapter will subscribe to, and the Formant streams that they will be mapped to. Each subscriber configuration has the following parameters:
| Parameter | Description |
|---|---|
ros2_topic | The ROS2 topic to pull messages from. |
ros2_message_type | The type of message to accept. |
formant_stream | The name of the Formant stream to ingest to. |
ros2_message_paths | The list of paths configurations to ingest data from. |
ros2_message_paths/path | The path within the ROS2 message. |
ros2_message_paths/tags | The tag set to ingest data with. |
Example
"ros2_adapter_configuration": {
"subscribers": [
{
"ros2_topic": "/example_topic",
"ros2_message_type": "example_msgs/msg/ExampleType",
"formant_stream": "example.stream",
"ros2_message_paths": [
{
"path": "example_path",
"tags": {
"example_key": "example_value"
}
}
]
}
]
}Publishers
The publishers section defines a list of ROS2 topics that the adapter will publish to, and the Formant streams that they will be mapped to.
The Formant application can send a message on a stream from either:
- A teleoperation control, such as a button, slider, joystick, or image click
- A command
In either of these cases, the name of the configured Formant control input must match the formant_stream parameter in the adapter.
| Parameter | Description |
|---|---|
formant_stream | The name of the Formant stream to publish data from. |
ros2_topic | The name of the ROS2 topic to publish data to. |
ros2_message_type | The type of ROS2 topic to publish data to. |
Example
"ros2_adapter_configuration": {
"publishers": [
{
"formant_stream": "example.stream",
"ros2_topic": "/example_topic",
"ros2_message_type": "example_msgs/msg/ExampleType",
}
]
}Service clients
The service_clients section defines a list of ROS2 services that the adapter will call, and the Formant streams that they will be mapped to.
Formant commands can be mapped to services by setting the formant_stream parameter to the name of the configured Formant command.
Services with zero or one parameter can be called using the following logic:
- If the service has zero parameters, a command with any parameter (or no parameters) will call it
- If the service has one numeric parameter, a command with a single numeric parameter will call it
- If the service has one string parameter, a command with a single string parameter will call it
- If the service has one boolean parameter:
- If the command has no parameters, it will call the service with "true"
- If the command has a parameter that maps to a boolean value, it will call the command with that value
- True parameters include
["true", "True", "TRUE", "t", "T", "1"] - False parameters include
["false", "False", "FALSE", "f", "F", "0"]
- True parameters include
| Parameter | Description |
|---|---|
formant_stream | The name of the Formant stream to accept commands from. |
ros2_service | The name of the ROS2 service to call. |
ros2_service_type | The type of ROS2 service to call. |
Example
"ros2_adapter_configuration": {
"service_clients": [
{
"formant_stream": "example.stream",
"ros2_service": "/example_service",
"ros2_service_type": "example_services/srv/ExampleService",
}
]
}Localization
The Formant localization datapoint includes many fields which are all aggregated to create a single aligned world perspective.
The localization section defines a list of ROS2 topics that the adapter will subscribe to, and the Formant localization datapoint fields that they will be mapped to.
This datapoint uses a special localization manager to aggregate the data from all of the configured topics. It is built to publish only the necessary data in order to save bandwidth.
This configuration section also maps incoming navigation controls such as waypoints from the localization UI to ROS2 topics.
| Parameter | Description |
|---|---|
formant_stream | The name of the Formant stream to ingest to. |
base_reference_frame | The base reference frame to use. |
odometry_subscriber_ros2_topic | The odometry ROS2 topic name. |
map_subscriber_ros2_topic | The map ROS2 topic name. |
point_cloud_subscriber_ros2_topics | A list of ROS2 topics to ingest point clouds from. |
path_subscriber_ros2_topic | The ROS2 topic to ingest path messages from. |
goal_subscriber_ros2_topic | The ROS2 topic to ingest goal messages from. |
goal_publisher_ros2_topic | The ROS2 topic to publish goal messages from waypoint UI clicks to. |
cancel_goal_publisher_ros2_topic | The ROS2 topic to publish waypoint cancellation messages to. |
Example
{
"ros2_adapter_configuration": {
"localization": {
"formant_stream": "example.localization",
"base_reference_frame": "map",
"odometry_subscriber_ros2_topic": "/odom",
"map_subscriber_ros2_topic": "/map",
"point_cloud_subscriber_ros2_topics": [ {"ros2_topic": "/scan"}, {"ros2_topic": "/stereo/depth/points"} ],
"path_subscriber_ros2_topic": "/plan",
"goal_subscriber_ros2_topic": "/goal_pose",
"goal_publisher_ros2_topic": "/goal_pose",
"cancel_goal_publisher_ros2_topic": "/move_base/cancel"
}
}
}Transform tree
The Formant transform tree datapoint includes the trasnform tree from /tf and /tf_static rooted at a specific base_reference_frame(e.g. base_link)
The transform_tree section requires a base_reference_frame to root the tree
| Parameter | Description |
|---|---|
base_reference_frame | The base reference frame to use for the transform tree. |
Example
{
"ros2_adapter_configuration": {
"transform_tree": {
"base_reference_frame": "base_link"
}
}
}Numeric sets
| Parameter | Description |
|---|---|
formant_stream | The name of the Formant stream to ingest a numeric set to. |
ros2_subscribers | The list of subscriber configurations to pull numeric data from. |
ros2_subscribers/ros2_topic | The ROS2 topic to pull numeric data from. |
ros2_subscribers/ros2_message_path | The ROS2 message path to use to select data from messages on the topic. |
ros2_subscribers/label | The text to use for the label of this value in the numeric set. |
ros2_subscribers/unit | The text to use for the unit of this value in the numeric set. |
Example
"ros2_adapter_configuration": {
"numeric_sets": [
{
"formant_stream": "example.numeric_set",
"ros2_subscribers": [
{
"ros2_topic": "/example_topic",
"ros2_message_path": "example_numeric_value_path_1",
"label": "example label 1",
"unit": "units"
},
{
"ros2_topic": "/example_topic",
"ros2_message_path": "example_numeric_value_path_2",
"label": "example label 1",
"unit": "units"
},
]
}
]
}Using adapter configuration window
- After uploading the adapter, click the gear icon to open the configuration window:
Opening the adapter configuration window.
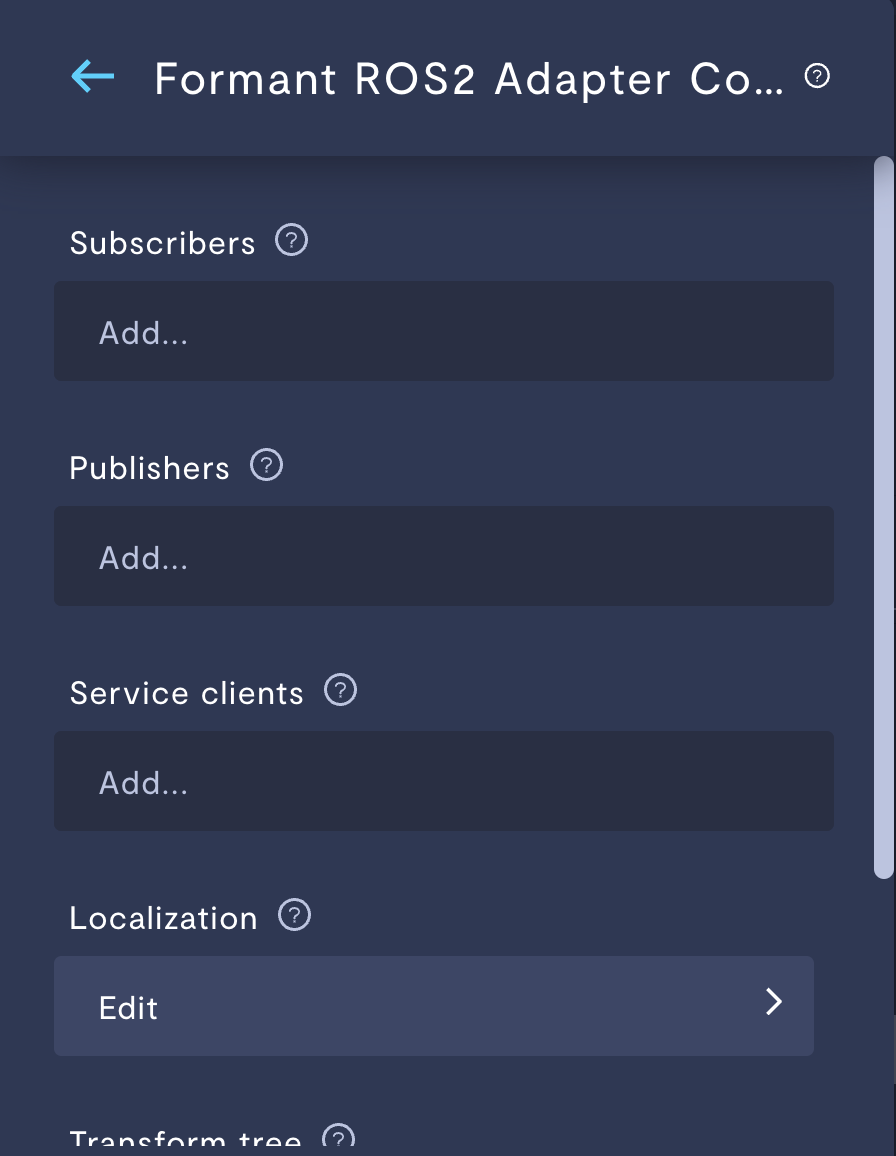
- For each ROS 2 topic you want to map to a Formant stream, click the appropriate section and fill in each parameter as described in Configuration Overview.
In blob data
As seen in Create a device, blob data is a free-form text block associated with your device which you can use to store configuration data. You can store your configuration for this adapter in JSON syntax directly in the blob data section for your device.
- Write your JSON configuration for the adapter.
- In Formant, in the upper-left corner, open the menu and go to Settings >> Devices. Click the device to which you want to apply this adapter configuration.
- Scroll down to the Blob data section. Copy your entire JSON configuration and paste it into Blob data.
- Click Save.
Data type support and conversion
For a full list of Formant telemetry types, see How telemetry streams work.
The list supported datapoints by the Formant ROS 2 Adapter is as follows:
Basic datapoints
- Numeric (UInt, Int, and Float types)
- Text (String, Char)
- Bitset (Bool)
- Location (NavSatFix)
- Battery (Battery)
All other input types will be ingested as JSON.
Input from multiple fields
- Bitset (multiple Bool inputs)
- Numeric Set (multiple UInt, Int, or Float inputs)
Rich datapoints
- Point Clouds (PointCloud2, LaserScan)
- Compressed Images
- Raw Images (into video)
- Localization (Map, Odometry, Path, etc.)
- Transform Tree (
/tf,/tf_static)
Type conversions
Topics will automatically be ingested as their corresponding Formant type:
| ROS topic type | Formant datapoint type |
|---|---|
| Bool, message with bool-valued message paths | bitset |
| Char, String | text |
| Float, Int, Uint | numeric |
| NavSatFix | location |
| LaserScan, PointCloud2 | point cloud |
| CompressedImage | image, video |
Stream name will be automatically configured from the topic if it is not set. (e.g., /base/cmd_vel becomes base.cmd_vel) The "stream" configuration can be set to change the stream name of ingested datapoints manually.
If you notice an issue with this page or need help, please reach out to us! Use the 'Did this page help you?' buttons below, or get in contact with our Customer Success team via the Intercom messenger in the bottom-right corner of this page, or at [email protected].
Updated 5 months ago