
This guide will teach you how to create and handle custom commands using the Agent SDK.
Step 1: Create a custom command
Before you write your command handling script, you'll want to create custom commands in the Formant web application. To do so, see Step 1 of Create a custom command.
Step 2: Write a script which registers a command request callback
You can handle commands by using the register_command_request_callback() method of agent client:
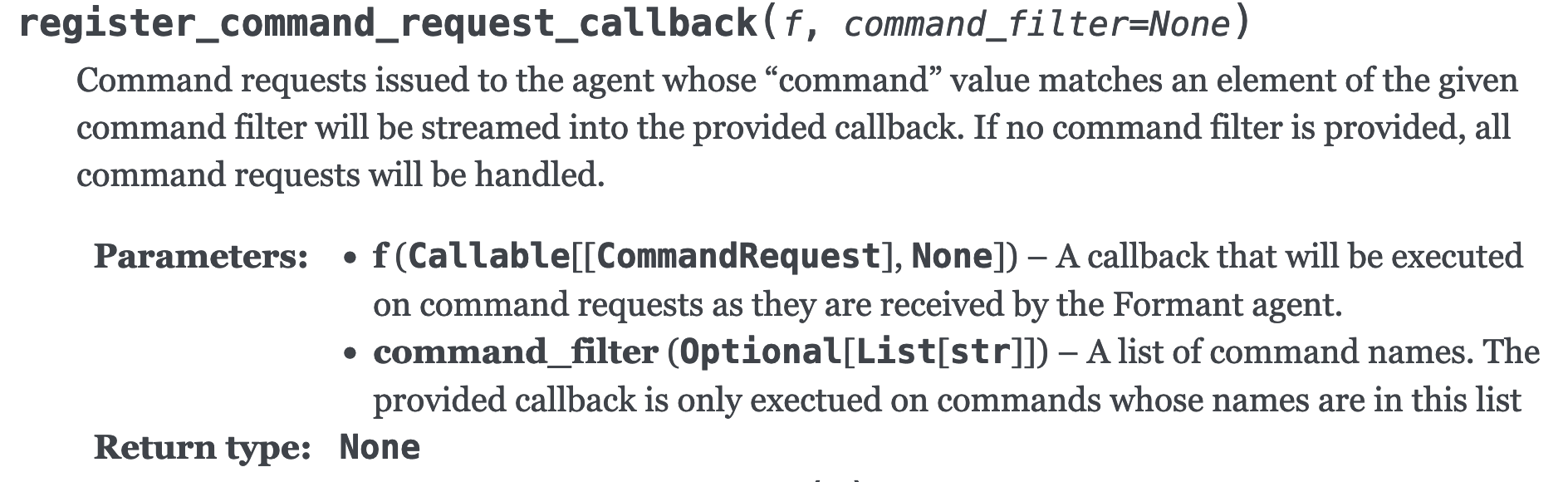
The register_command_request_callback() method in the Agent SDK Reference.
For example:
from formant.sdk.agent.v1 import Client as FormantClient
fclient = FormantClient()
def handle_command_request(request):
print(request.command)
fclient.register_command_request_callback(
handle_command_request, command_filter=["sensor_check", "send_on_route"]
)
request.command, the string you enter incommand_filter, and the Command field you defined in Step 1 must all match.
Registering multiple callbacks
Multiple commands can be handled by the same callback. You can designate which commands are handled by the callback by adding command names to the command_filter list.
Single-receiver behaviorIf several callbacks are registered to the same agent, such as when multiple applications are running, only one callback will receive any given command request.
This behavior is different from teleoperation command streams. For more information, see Handling teleop command streams.
Example
For an example of command callbacks, see GitHub: handle_commands.py.